Los Sistemas Globales de Navegación por Satélite (GNSS, por sus siglas en inglés) son de gran utilidad para multitud de sectores, incluido el transporte. En 2016, Europa declaró los servicios iniciales de su propio sistema, Galileo, que supone un enorme avance en cuanto a prestaciones, calidad y diversidad de servicio, además de ofrecer independencia y soberanía a los usuarios.
A diferencia del GPS estadounidense, el GLONASS ruso o el BeiDou chino –con los que, por otro lado, es interoperable–, el sistema europeo Galileo es el primero de la historia diseñado específicamente para uso civil, para diferentes grupos de usuarios y distintos servicios (abierto, de alta precisión, autenticado, gubernamental, emergencias/búsqueda y rescate, etc.). Pero, además, ofrece unas prestaciones sin precedentes en cuanto a precisión y calidad de las señales.

Proyectos europeos como RailGAP, en el que participa Ineco junto con Adif y CEDEX, dan continuidad a investigaciones anteriores sobre el uso del posicionamiento GNSS. / FOTO_MITMA
En el ámbito ferroviario, las aplicaciones basadas en GNSS sirven, por una parte, para optimizar la logística, mejorar la gestión del material rodante y remolcado, ofrecer servicios de información al viajero, etc.; y por otra, aumentar la seguridad y el control con un coste bajo, al poder sustituir las balizas físicas de ERTMS (Sistema Europeo de Señalización Ferroviaria) por balizas virtuales. Así, el uso del posicionamiento por satélite con ERTMS permitirá reducir costes en el despliegue del sistema que la Comisión Europea está impulsando en los principales corredores del continente –labor que, precisamente, coordina Ineco (ver ITRANSPORTE 70)–, sobre todo en líneas regionales y de bajo tráfico.
De la baliza física a la virtual
La compañía, junto con Adif, el Administrador de Infraestructuras Ferroviarias español, y el CEDEX, el Centro de Experimentación de Obras Públicas del MITMA, y otros socios internacionales, ha participado en los últimos años en varios proyectos europeos de innovación dedicados a probar y caracterizar la tecnología de satélite en el ámbito ferroviario.
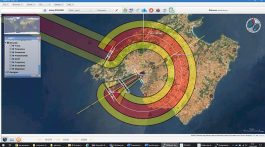
Las pruebas con trenes en un entorno real que hasta ahora se han realizado, como las del proyecto ERSAT GGC en 2019 (ver ITRANSPORTE 68), demuestran la idoneidad de Galileo frente al resto de sistemas. Sin embargo, la tecnología presenta aún inconvenientes técnicos que es preciso resolver antes de llegar al mercado en forma de soluciones comerciales. Así, la orografía de los trazados de algunas líneas y la presencia de elementos como túneles, pasos superiores, obstáculos naturales o áreas urbanas provocan zonas ‘oscuras’ en la transmisión de la señal GNSS, lo que limita el funcionamiento de las balizas virtuales. Además, existen otros problemas derivados de las interferencias intencionadas como el jamming o el spoofing. Aquí es donde la fusión con otras tecnologías y desarrollos de navegación pueden ayudar a resolver estos problemas.
El uso de GNSS para operaciones ferroviarias depende en gran medida de la configuración del entorno; de ahí la necesidad de clasificar e identificar los factores que contribuyen al funcionamiento en condiciones degradadas
El proyecto RAILGAP, (RAILway Ground truth and digital mAP), que arrancó a principios de 2021 y se prolongará hasta 2023, da continuidad a las investigaciones anteriores en este ámbito. Incluido en el programa Horizonte 2020, y gestionado por la EUSPA, Agencia de la Unión Europea para el Programa Espacial, está liderado por el gestor de infraestructuras italiano Rete Ferroviaria Italiana (RFI) y en él participan las empresas (Radiolabs, Hitachi Rail STS, RINA, Trenitalia, ASSTRA, Adif, CEDEX, Ineco, DLR, Université Gustave Eiffel y Unife).
Su objetivo es desarrollar soluciones innovadoras de alta precisión para la obtención del denominado ground truth y de los mapas digitales de las líneas ferroviarias, esenciales para obtener el posicionamiento de los trenes con fiabilidad y eficiencia. El ground truth proporcionará los datos de coordenadas geográficas del tren en función del tiempo, junto con variables dinámicas del mismo como la velocidad o la aceleración. Para ello, se recopilarán cantidades masivas de datos de trenes, tomadas con varios tipos de sensores, con lo que se pretende mejorar la exactitud del mapeo en las zonas ‘oscuras’, como áreas urbanas, con abundante vegetación, trincheras, etc.
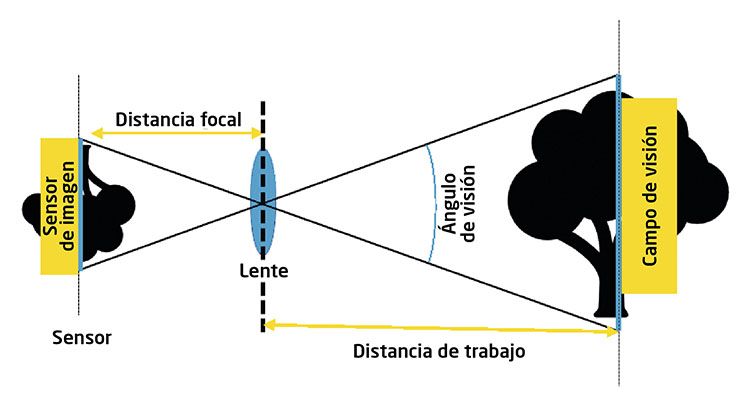
Las soluciones propuestas se basan en la utilización de otros sensores como cámaras, sensores LIDAR o unidades inerciales junto con tecnologías de inteligencia artificial para mejorar el posicionamiento proporcionado por GNSS en las zonas ‘oscuras’. Los sensores inerciales son utilizados para detectar las fuerzas que actúan sobre el tren, lo que permite estimar su desplazamiento en el tiempo, y los sensores ópticos (cámaras y LIDAR), combinados con sistemas de inteligencia artificial, permiten calcular la posición del tren en relación a elementos clave situados en la vía, permitiendo posicionamientos centimétricos en condiciones óptimas.

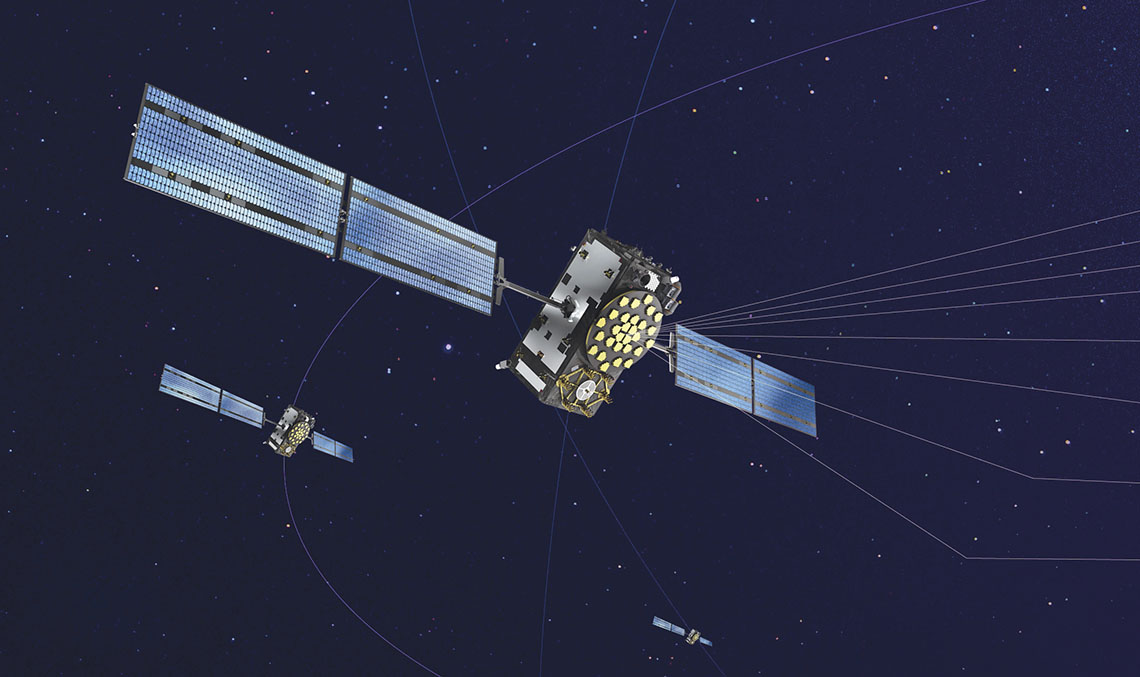
Los 30 satélites (24 operativos y 6 de repuesto) con los que contará el sistema Galileo una vez se complete el despliegue, con servicios iniciales desde 2016, serán capaces de localizar receptores con un margen de error inferior a 1 metro. Además, es interoperable con el GPS norteamericano, el GLONASS ruso o el BeiDou chino.
RAILGAP contribuirá a la sostenibilidad del sistema ERTMS y los sistemas de mando y control para la modernización de las líneas regionales y locales, reduciendo así el consumo de energía.
Ineco participa en los ocho paquetes de trabajo del proyecto, y liderará el cálculo del ground truth basado en una solución de hibridación de sensores. También contribuye de forma significativa a la identificación y caracterización de los sensores ópticos necesarios para el proyecto, sobre todo cámaras y sensores LIDAR. Las actividades del paquete de trabajo 7, que tienen por objeto implementar el mapa digital, también se apoyarán en la experiencia de Ineco en el uso de inteligencia artificial aplicado a imágenes para la identificación de elementos clave, tal y como ya ha hecho para otros proyectos para Adif.
En esta línea de trabajo, Ineco desarrollará los algoritmos que permitan, haciendo uso de las imágenes captadas por las cámaras ópticas y estereoscópicas, reconocer los elementos relevantes de la vía y posicionarlos utilizando técnicas avanzadas de tratamiento de imágenes e Inteligencia Artificial.
Por su parte, Adif trabaja también en todos los paquetes del proyecto, además de movilizar un vehículo para las pruebas, como ya había hecho anteriormente en el proyecto ERSAT GGC. El Laboratorio de Interoperabilidad Ferroviaria del CEDEX (líder mundial en ERTMS, ver IT32 y 53) se centrará en la arquitectura de los equipos en el tren, la fase de recogida de datos y la integración en el laboratorio.
RAILGAP propone emplear cámaras, sensores LIDAR o unidades inerciales junto con tecnologías de inteligencia artificial para mejorar el posicionamiento GNSS en las zonas ‘oscuras’.
Proyectos anteriores
Anteriormente, tanto Ineco como Adif y el CEDEX, han participado en otros proyectos de investigación e innovación en aplicaciones ferroviarias GNSS, como ERSAT GGC (2017-2019), también enmarcado en el programa Horizonte 2020 (ver ITRANSPORTE 69), y GATE4RAIL (2018-2021), dentro de Shift2Rail, el programa sectorial de la Comisión Europea dedicado a la innovación dentro del sector ferroviario.
El objetivo del proyecto ERSAT GGC, en el que participaron 14 empresas de cinco países europeos, era estudiar la implantación de la tecnología de satélite en el sistema europeo de gestión del tráfico ferroviario ERTMS a través de balizas virtuales. Para ello, se definió una metodología y una serie de herramientas SW para clasificar una línea de cara a la implantación de balizas virtuales a lo largo de su recorrido.
Dentro del proyecto también se llevó a cabo una campaña de pruebas en tres países, Francia, Italia y España, donde se tomaron los datos de entrada que alimentaban a la herramienta de clasificación.
Por otra parte, en 2018 se inició GATE4RAIL, que buscaba avanzar en la virtualización de las pruebas del sistema ERTMS basado en posicionamiento mediante satélites. El consorcio que ha desarrollado el proyecto estaba integrado, además de por Ineco, por Radiolabs (líder, Italia), Rete Ferroviaria Italiana (RFI), Ifsttar (Francia), M3Systems (Bélgica), Unife (Bélgica), CEDEX (España), Bureau Veritas Italia (BVI), y Guide (Francia). La plataforma desarrollada estaba formada por tres bloques: GNSS, tren y vía, y el reto consistió en ejecutar una simulación con módulos de cada bloque ubicados en distintos países. En este proyecto, concluido en 2021, la labor de Ineco se centró en la arquitectura de sistema y la definición de los escenarios, además de proporcionar los datos de obstáculos por medio de la herramienta GNSS4RAIL.
Retos del uso de GNSS en el sector ferroviario

¿EL TREN DEL FUTURO? Tren robot autónomo para transporte de mineral de la multinacional Rio Tinto en Pilbara, al oeste de Australia. / FOTO_RIO TINTO
El uso de GNSS supone para el sector ferroviario retos transversales y otros de índole técnica. Las aplicaciones relacionadas con la protección, la ciberseguridad, la normativa legislativa y reglamentaria, la estandarización o la agilidad en los procesos de implementación, corresponden al primer grupo. Con el segundo están relacionadas aquellas otras tales como el tratamiento de las interferencias, el efecto multipath, la integridad de la señal de satélite, la resolución de las zonas ‘oscuras’ para la comunicación, como los túneles y las montañas, las líneas de alta complejidad, con bifurcaciones y cruces, o la precisión en el reconocimiento de líneas paralelas y estaciones.
El futuro de GNSS en el ferrocarril tiene hitos reconocibles a corto, medio y largo plazo. Los más próximos son los avances en la localización del tren con la mayor precisión posible, lo cual permitirá aumentar la capacidad de las vías. Otro hito es el desarrollo de la baliza virtual basada en la transmisión continua de datos PVT y que redundará en un ahorro de costes. Por último, la detección de movimientos del material rodante mientras el equipo ETCS de a bordo está desconectado, lo que se conoce como cold movement detection (CMD).
A medio plazo, se sitúa el desarrollo del ERTMS nivel 3, cuya característica definitoria es el cantonamiento móvil y que tendrá el efecto de gestionar la capacidad de las líneas en términos mucho más elevados que los actuales.
Y ya, a largo plazo, se sitúa el objetivo del tren autónomo, aunque ya hay algunas iniciativas en este campo, como la Rio Tinto Driverless Cargo Line, en Australia. Así, esta línea sin conductor conocida como ‘tren robot’ cuenta con 1.700 kilómetros de vías y 220 locomotoras monitorizadas, y registra un tráfico de datos de 12 GB/día y una lógica de detección de trenes automática basada en ERTMS nivel 2. Con esta arquitectura, la multinacional minera Rio Tinto ha desarrollado modelos predictivos para detectar posibles fallos en operaciones próximas y recomienda acciones de mantenimiento cuya aprobación final está en manos del personal técnico, como es lógico.
Vídeo